

容量充足 1756-CPR2 通訊模塊 嵌入式操作
          | 更新時間 2025-01-10 13:30:00 價格 596元 / 件 品牌 A-B 型號 1756-CPR2 產地 美國 聯系電話 0592-6372630 聯系手機 18030129916 聯系人 蘭順長 立即詢價 |

容量充足 1756-CPR2 通訊模塊 嵌入式操作
1756-A10 1756-A13 1756-A17 1756-A4 1756-A7 1756-BA1 1756-BA2 1756-BATA | 1756-IF16 1756-IF16H 1756-IF8 1756-IF8H 1756-IF8I 1756-IF6I 1756-IF6CIS 1756-IT6I
| 1794-IM16 1794-IM8 1794-IR8 1794-IRT8 1794-IT8 1794-IV16 1794-IV32 1794-OA16
| 1756-HSC 1756-IA16 1756-IA16I 1756-IA32 1756-IB16 1756-IB16D 1756-IB16I 1756-IB32
|
1756-CN2 1756-CN2R 1756-CNB 1756-CNBR 1756-DHRIO 1756-DNB 1756-EN2T 1756-EN2TR 1756-EN3TR 1756-ENBT 1756-ENET 1756-EWEB | 1756-IR6I 1756-IR12 1756-IRT8I 1756-IT6I2 1756-IM16 1756-L61 1756-L62 1756-L63 1756-L64 1756-L65 1756-L71 1756-L71S
| 1756-M03SE 1756-M08SE 1756-M16SE 1756-N2 1756-OA16 1756-OA16I 1756-OB16D 1756-OB16E 1756-OB16I 1756-OB32 1756-OF4 1756-OF8
| 1756-BATA 1756-CNB 1756-IC16 1756-IB16 1756-IB32 1756-IF16 1756-IR61 1734-ACNR 1734-ADN 1734-AENT 1734-AENTR 1734-APB
|
1756-TBS6H 1756-TBSH 1757-SRM 1746-N2 1746-NI16I 1746-NI4
| 1756-PA75R 1756-PB72 1756-PB75 1756-RM 1756-IB16 1746-IV32
| 1756-OF8I 1756-OW16I 1756-PA72 1756-PA75 1794-OA8 1794-OA8I
| 1746-IA16 1746-IB16 1746-IB32 1746-IM16 1746-IO12DC 1746-ITB16 |
容量充足 1756-CPR2 通訊模塊 嵌入式操作
01
力傳感器是力控的關鍵部件,六維力傳感器測量為全面
1.1 六維力傳感器是維度高的力覺傳感器
力覺傳感器,顧名思義就是感知并度量力的傳感器。按照測量維度,力覺傳感器 可以分為一至六維力傳感器。能測幾個維度,它就是幾維力傳感器。常見的是 一維、三維和六維力傳感器,二維和五維的力傳感器較少。
(1) 一維力傳感器:如果力的方向和作用點是固定的,此時可以選擇用一維 力傳感器進行測量。我們可以通過安裝定位,使被測量力 F 的方向完全 與標定坐標軸(OZ 軸)重合,這樣就可以對力進行jingque測量。代表產品 有稱重傳感器、壓力傳感器等。當力的方向與傳感器的測量軸線平行但 不重合,此時傳感器的測量結果將會出現較大的誤差。
(2) 三維力傳感器:如果力 F 的作用點 P 始終與傳感器的標定參考點 O 保持 重合,力 F 的方向在三維空間中隨機變化,那么用三維力傳感就能完成 測量任務。因為被測量的力可以分解為三維力傳感器標定坐標系下的三 個正交分量(Fx、Fy、Fz),三維力傳感器的三個測量單元可以分別對 其進行測量。當力的作用點遠離傳感器,這個力在經過正交分解并平移 至三維力傳感器的校準中心后,傳感器既要承受力 Fx/Fy/Fz 三分量的作 用,又要承受 Mx/My/Mz 三個彎矩的作用,這種情況下,三維力傳感器 的測量結果將會出現較大偏差。
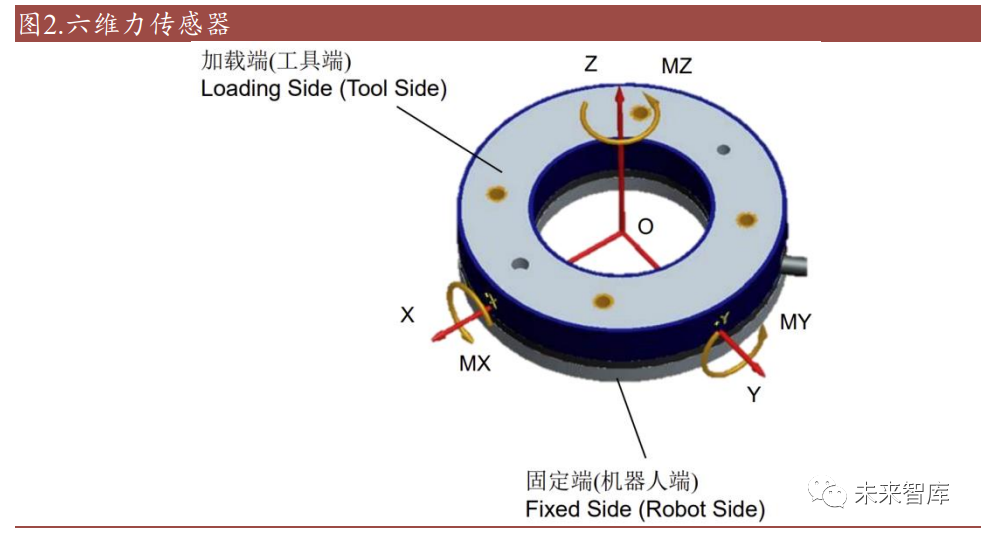
(3) 六維力傳感器:如果力的方向和作用點都在三維空間內隨機變化,此時 應該選擇用六維力傳感器進行測量。因為空間中任意作用點上的力可以 在六維力傳感器的標定坐標系內,分解為沿標定坐標軸的三方向分力 (FX、FY、FZ)和繞標定坐標軸的三方向力矩(MX、MY、MZ)。這 類傳感器更適用于參考點的距離較遠,且隨機變化情景,測量精度要求 較高。
六維力傳感器是維度高的力覺傳感器,它能給出為全面的力覺信息。六維力傳感器,又叫六維力/力矩傳感器、六軸力傳感器、F/T 傳感器,是一種特 殊的力傳感器,能夠同時測量中性坐標系(OXYZ)內的三個力(FX、FY、FZ) 和三個力矩(MX、MY、MZ)。六維力傳感器一般分成固定端(機器人端)和 加載端(工具端),傳感器的內部算法會解耦各方向力和力矩間的干擾,使力的 測量更為。
根據傳感元件的不同,六維力/力矩傳感器主要分為: 應變片式、光學式以及壓 電/電容式。目前,市場應用的六維力/力矩傳感器大部分是基于應變式的測量。基于壓電、電容和光學等原理測量的傳感器有一定的理論研究和實驗,下游尚未 得到廣泛應用。每種類型的六維力傳感器都具有其獨特的優點和適用范圍,隨著相關研究的不斷深入,不同測量機理的傳感器將會發揮自身優勢被應用到各種場 合,進而推動六維力傳感器向多元化方向發展。
經過對穩定性、剛度、動態特性、成本與信噪比五個維度的比較,硅應變傳感 器綜合性能優異。硅應變片的穩定性、信噪比、動態特性要好于金屬應變片,剛 度上兩者差異不大,成本上金屬略優,但這幾年硅應變片的工藝有了提升和改進, 綜合成本也在大幅降低。
六維力/力矩傳感器的研發難度非常大。它不是三個一維力傳感器和三個扭矩傳 感器結構的簡單疊加,它的非線性力學特征明顯,要考慮多通道信號的溫漂、蠕 變、交叉干擾、數據處理的實時性,再加之六維聯合加載標定的復雜性 ,六維 力傳感器的技術難度可謂是一維力傳感器難度的六次方。
六維力傳感器面臨兩個關鍵技術問題:全方位機械過載保護和動態性能。機械 過載保護是指作用到傳感器的力超過某一數值時,為避免傳感器損壞而增加的一 種附屬結構。國內外學者也提出了基于不同結構的機械過載保護裝置,但由于保 護裝置結構復雜且加工精度要求較高等限制,生產出具有全方位機械過載保護裝 置的六維力傳感器的成熟產品仍有難度。傳感器性能指標包括靜態性能指標和動 態性能指標。在實際的力測量過程中,被測信號大多是動態信號,如機器人打磨 拋光時的接觸力、物體高速運動過程中的稱重和paodan發射過程時的后座力等信號, 這些信號屬于快速時變信號,動態性能較差的傳感器很難跟蹤測量這些信號,所以必須在充分了解傳感器的動態性能后方能選擇合適的傳感器來進行測量。
除了優化自身結構、形狀等方法提高動態性能外,一些國內外學者利用動態補償濾波 器、遺傳算法、神經網絡算法等智能算法來提高傳感器的動態性能,取得了良好 的效果。國外對六維力/力矩傳感器的研究起步較早。國內外學者對六維力傳感器結構都 做了大量的研究與改進,目的是提高傳感器的靈敏度和抗過載能力,減少維間耦 合誤差,改善動態性能,從而更好地輔助機器人實現智能化控制。
1.2 力傳感器是機器人實現主動柔順控制的核心部件
六維力測量技術屬于平臺型技術,根據應用場景的環境、載荷、安裝、通訊、算 力、動力學特性等需求不同,在不同的應用領域,六維力傳感器的產品形態和技 術特點也有較大區別。目前,六維力傳感器主要應用于汽車行業的碰撞測試、輪 轂、座椅等零部件測試以及航空航天、生物力學、醫療領域、科研實驗、機器人 與自動化等領域。
在汽車領域,六維力/力矩傳感器被廣泛地用在汽車部件和系統級測試、發動機 和動力總成測試、車輛和試驗廠測試、總裝和終測試。它們在確定新車和部件 設計的完整性和優化方面都能發揮重要作用,同時還有助于保證效率、安全性和 正確的功能。航空航天領域是六維力傳感器早的重要應用領域之一,可用于測量風洞試驗、 飛機、衛星、火箭等飛行器各種運動狀態下的六維力信息,通過這些信息,飛行 器可以更加準確地感知環境,控制姿態,完成各項任務。隨著航空航天技術的不 斷發展和應用的深入,六維力和力矩傳感器還可以用于飛機制造、飛行器著陸和 起飛過程的監測、機械臂控制、結構健康監測等領域。六維力傳感器的應用能夠 提高航空航天系統的性能、安全性和可靠性。
在醫療手術和康復領域,手術機器人的力感知可作為力反饋的依據以提升手術的 安全性。根據臨床場景的不同,手術機器人主要分為腔鏡機器人、骨科機器人、 穿刺機器人、經自然腔道機器人、泛血管機器人等五類機器人。目前,協作機械 臂+六維力傳感器的組合已廣泛應用于血管介入手術機器人、外科手術機器人、 醫療檢測機器人及遠程操控機器人等;中國手術機器人行業處于早期發展階段, 增長潛力較大。根據 GGII預計,未來 3-5年,骨科機器人和泛血管手術機器人將 占手術機器人市場的 20%以上。隨著技術的不斷進步和應用的深入,六維力傳感 器在醫療領域的應用前景將會更加廣闊,六維力傳感器產品將逐漸成為類似應用 場景中的剛需。
柔順控制可解決很多傳統位置控制難以解決的問題,有利于擴展機器人的功能。在許多交互任務中需要機器人與對象或環境發生接觸,兩者接觸時,會在接觸面 之間產生相互作用力,只靠位置控制可能導致很大的誤差。由于采用位置控制的機器人可通過結構化環境的設置,依靠快速、的位置控制預設編程完成“固 定軌跡”的任務。而在執行接觸任務時,末端執行器與規劃軌跡之間的微小偏差 就可能導致機械臂與物體表面脫離接觸或在接觸面上施加過強的壓力;對于機器 人的高剛性結構,微小的位置誤差可能會導致非常大的作用力甚至災難性的后果。所以為了實現交互任務,機器人需要表現出柔順性。柔順力控主要是從力傳感器 獲得力信號,再將其轉化為機器人的控制信號,使機器人響應此信號而動作。
人機協作要以機器人的柔順控制作為前提。當與機器人產生交互的外界環境發生 改變,機器人應對這種改變產生順應性變化,這就是所謂的柔順性。如讓機器人 末端執行器在受到環境擾動時能保持與環境的恒定接觸力,或是機器人順應操作 人員施加的外部牽引力,以運動到操作人員期望的位置。柔順控制主要分為主動柔順控制和被動柔順控制。被動柔順控制主要依靠一些機 械裝置(如減震器、彈簧等)使機器人表現出對環境的柔順特性,主動柔順控制 依靠控制策略令末端產生需要的剛度、阻尼或力作用以達到柔順的目的。在實際 應用中,僅有少數的機器人在與環境接觸中具有非常有限的主動柔順能力。
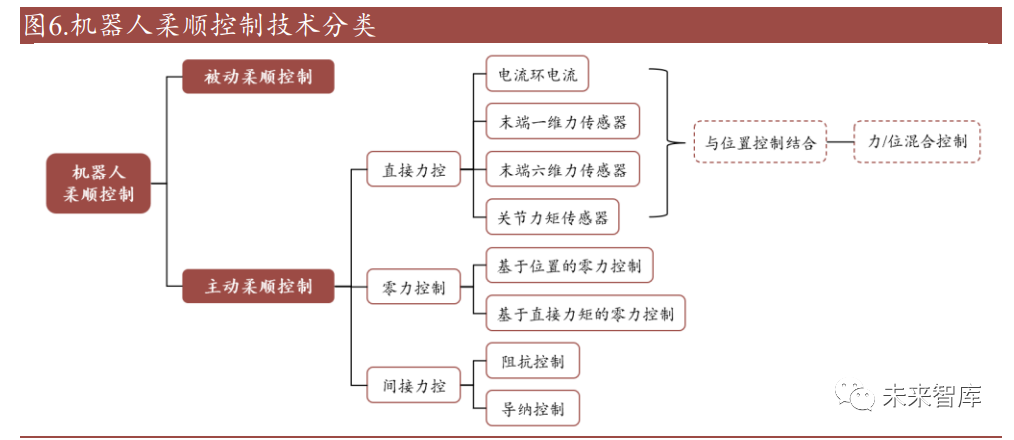
(1) 被動柔順控制:借助某些機械裝置的物理上的柔順性,對接觸力產生被動 的適應。如彈簧、阻尼等構成的柔順裝置,可以靠彈簧形變吸收或者阻尼損 耗機器人與環境產生接觸時產生的能量。但當前被動柔順控制方法在應用效 果上仍存在著多種不足,如結構剛度降低、機器人關節的重量增長、結構的 復雜性增加。在此背景之下,主動柔順控制則成為了現今研究者們開展柔順 控制研究的首要方式。
(2) 主動柔順控制:需要機器人獲取對力信息和位置信息的反饋,利用力與位 置的反饋信息結合相應算法去主動控制機器人運動或者作用力。機器人實現 主動柔順控制的方式主要有力/位混合控制、零力控制和阻抗控制這三種控 制理論。
力/位混合控制:這種理論模型有位置反饋環和力反饋環,機器人在進行任 務的過程中,可以把機器人末端執行機構的工作空間分解為位置、力兩個相 互正交且獨立的子空間。在力空間內,通過力控制方法確保實際接觸力大 程度的接近期望接觸力;在位置空間內,通過位置控制方法保證機器人能夠 沿期望軌跡運動,通過力和位置控制策略協同作用實現機器人對末端作用力 的主動柔順控制過程。
零力控制:直接示教又稱拖動示教是目前人機協作的主要方式之一,即人 類操作者直接通過手動拖動機器人來進行示教任務。而零力控制便是實現機 器人拖動示教的核心技術。目前零力控制主要有兩種實現方法:基于位置 的零力控制以及基于直接力矩控制的零力控制。
阻抗控制:根據機器人末端執行器的位置(或速度)和接觸力之間的對應 關系,通過控制器調整位置(速度)誤差或剛度系數來控制機器人末端執行 器的接觸力。阻抗控制理論根據控制原理可以分為基于位置的阻抗控制(導納控制) 和基于力的阻抗控制。

六維力/力矩傳感器是機器人實現柔順化、智能化操作的關鍵傳感設備。只具有 位置反饋將難以滿足柔順控制的需要,在機器人控制中加入力反饋環節勢在必行。機器人力覺傳感器是模仿人類四肢關節功能的機器人獲得實際操作時的大部分力 信息的裝置,是機器人主動柔順控制必不可少的,它直接影響著機器人的力控制 性能。在機器人力控解決方案中,目前應用為廣泛的力覺傳感器就是六維力傳 感器。
目前,六維力傳感器主要用于檢測、預防、控制、示教、測量、保護等場景,通 常安裝在機器人的底座或者末端,可以提供應用過程中的力交互信息,對于下游 客戶而言有效且可靠的數據至關重要。
未來,人形機器人力控技術的發展將呈現出多信息融合(觸覺、力覺和視覺等), 主要通過配備(AI、視覺、力覺傳感器等)傳感器得以實現,尤其在手腕、腳踝關 節等處更適用六維力矩傳感器,這將為六維力傳感器在人形機器人領域的應用 帶來巨大的發展空間。
容量充足 1756-CPR2 通訊模塊 嵌入式操作
 請聯系我們詢價
請聯系我們詢價- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
- 請聯系我們詢價
聯系方式
- 電 話:0592-6372630
- 銷售經理:蘭順長
- 手 機:18030129916
- 微 信:18030129916








